1
Symulator / Zmiana mapowania klawiszy w wersji 17.05
« dnia: 03 Lutego 2018, 21:13:47 »
Witam.
Od wersji 17.05 nastąpiła istotna zmiana klawiszologii - kiedyś było np p i shift-P, o i shift-O a teraz klawisz p raz podnosi raz opuszcza pantograf. Czy można w pliku eu07_input-keyboard.ini przywrócić dawną funkcjnalność ? Znalazłem tam następującą zmienną:
pantographtogglefront p // przelaczenie stanu pantografu przedniego
ale co dalej ?
Podobnie jest z innymi funkcjami c,x,y,u,i.
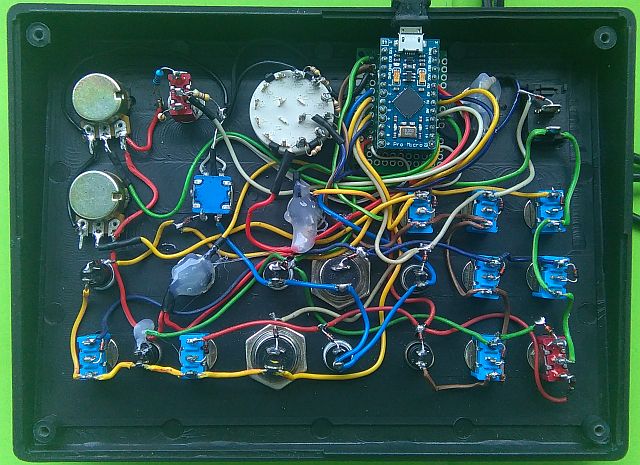
Już wyjaśniam dlaczego to takie istotne. Zbudowałem swego czasu pulpit sterujący maszyną na ArduinoMicroPro - tu jest opis:
http://eu07.pl/forum/index.php/topic,13529.510.html
Przy przy obecnym mapowaniu klawiszy nie jestem w stanie zsynchronizować stanu przełączników na pulpicie z symulatorem- program reaguje na przełączenie w dół przełącznika pantografu raz go podnosząc raz opuszczając. Myślę że wiele osób które w pocie czoła zmontowały bardziej realistyczne pulpity sterownicze mają ten sam jeśli nie większy problem.
Czy dało by się udostępnić dołączyć do nowej wersji maszyny plik mapujący klawisze po staremu ?
Od wersji 17.05 nastąpiła istotna zmiana klawiszologii - kiedyś było np p i shift-P, o i shift-O a teraz klawisz p raz podnosi raz opuszcza pantograf. Czy można w pliku eu07_input-keyboard.ini przywrócić dawną funkcjnalność ? Znalazłem tam następującą zmienną:
pantographtogglefront p // przelaczenie stanu pantografu przedniego
ale co dalej ?
Podobnie jest z innymi funkcjami c,x,y,u,i.
Już wyjaśniam dlaczego to takie istotne. Zbudowałem swego czasu pulpit sterujący maszyną na ArduinoMicroPro - tu jest opis:
http://eu07.pl/forum/index.php/topic,13529.510.html
Przy przy obecnym mapowaniu klawiszy nie jestem w stanie zsynchronizować stanu przełączników na pulpicie z symulatorem- program reaguje na przełączenie w dół przełącznika pantografu raz go podnosząc raz opuszczając. Myślę że wiele osób które w pocie czoła zmontowały bardziej realistyczne pulpity sterownicze mają ten sam jeśli nie większy problem.
Czy dało by się udostępnić dołączyć do nowej wersji maszyny plik mapujący klawisze po staremu ?